Eğitim Laboratuvarları
Elektrikli Araç Geliştirme Laboratuvarı
Bu laboratuvarda, elektrikli araç tahrik ve kontrol teknolojileri üzerinde çalışmalar yürütülmektedir. Laboratuvarda bir kaç elektrik tahrikli araç bulunmaktadır. Araç davranışını ölçmek ve test edebilmek için çesitli ekipmanlar mevcuttur. Endüstri için yapılan araştırma projelerinin yanında; “Atılım Yarışma Takımı” Öğrenci Toplululuğu da çalışmalarını bu laboratuvarda yürütmekte ve yarışmalara hazırlanmaktadır.
Lisansüstü Araştırma Laboratuvarı
Bu laboratuvar, pil kullanım teknolojileri üzerine araştırma yapmak için kullanılmaktadır. Laboratuvarda bir adet iklimlendirme dolabı, bilgisayarlı pil şarj ve deşarj cihazları, sıcaklık ölçüm cihazları ve akışkan, termal ve manyetik analizler için güçlü bilgisayarlar ile donatılmıştır.
Lisans Araştırma Laboratuvarı
Bu laboratuvar, lisans öğrencilerinin projelerinin araştırmalarını, tasarımlarını, pratik uygulamalarını ve testlerini yapmak için kullanılmaktadır. Bu laboratuvar temel yazılımları içeren yeterli sayıda bilgisayar, çeşitli güç kaynakları, osiloskoplar, sinyal üreteçleri ve dijital multimetrelerle donatılmıştır.
Robotik Sistemler Laboratuvarı
Laboratuvarın temel amacı robotik sistemlerin tasarımı, modellenmesi ve kontrolü üzerinde çalışmaktır. Profesyonel bir robotik manipülatör ve birkaç delta robot ile donatılmıştır. Yeterli sayıda elektronik ölçüm aletleri de mevcuttur.

Uçan Robotlar Laboratuvarı
Laboratuvar, iç mekan navigasyonu için kullanılan OptiTrack Hareket Yakalama Sistemi ile donatılmıştır. Ek olarak, laboratuvarda ayrıca son derece sofistike bir quadrotor olarak kabul edilen DJI Phantom 4 Pro bulunmaktadır. Tesis, lisans ve yüksek lisans öğrencileri tarafından özel amaçlı dronlarını oluşturmak için de kullanılmaktadır. Ayrıca uçuş testi amaçlı kullanılabilecek güvenli bir alana sahiptir.

Mekatronik Mühendisliği Eğitim Laboratuvarı
Bu eğitim laboratuvarı 27 bilgisayar, güç kaynakları, osiloskoplar ve dijital multimetreler ile donatılmıştır. Ürün Geliştirme, Mikrodenetleyiciler, Mekatronik Bileşenler, Mekatronik Enstrümantasyon, Sayısal Devreler ve Sistemler, Sinyaller ve Sistemler, Akıllı Mekatronik dersleri ile ilgili uygulamalı faaliyetler ve deneyler bu laboratuvarda yapılmaktadır. Bu laboratuvarda bulunan elektronik ölçüm cihazları da öğrenciler tarafından proje çalışmalarında da kullanılmaktadır.

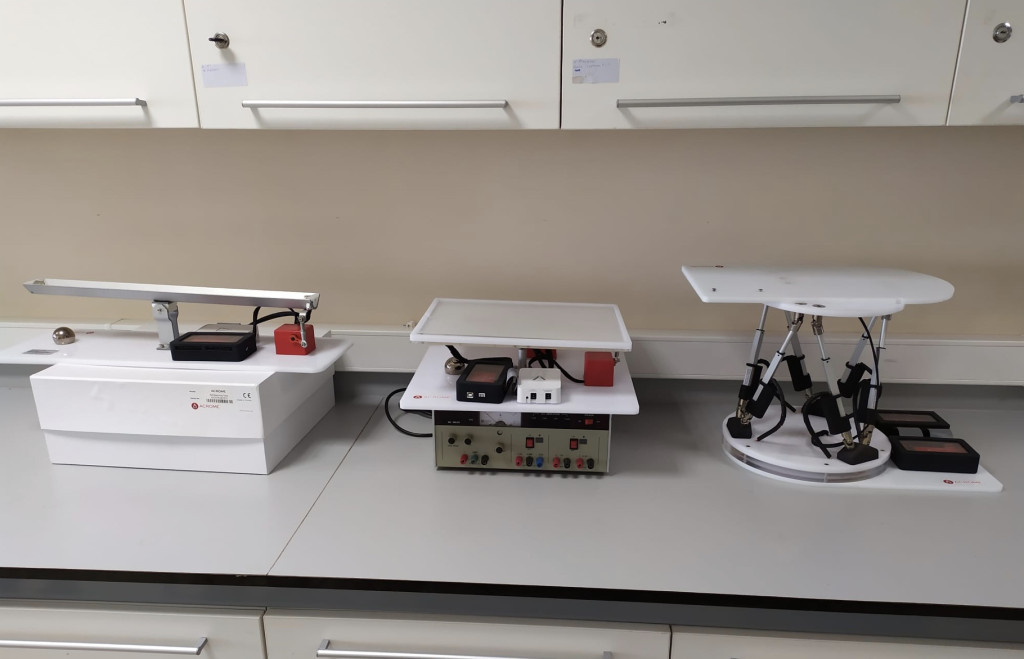
Kontrol Sistemleri Laboratuvarı
Bu eğitim laboratuvarı, mekatronik mühendisliği öğrencilerine temel kontrol yöntemlerini öğretmek için kullanılmaktadır. Laboratuvar, derslerde tartışılan temel konular üzerinde deney yapmak için farklı deney donanımlarından oluşmaktadır. Bu deney düzenekleri şunlardır: Delta Robot, Top ve Kiriş, Top Dengeleme Masası. Ayrıca yeterli sayıda bilgisayar, güç kaynakları, osiloskoplar ve diğer ölçüm ekipmanları mevcuttur. Bu laboratuvarda lisans ve lisansüstü öğrencilerinin araştırma çalışmaları yapabilmeleri için Quanser deney düzenekleri, 2 DOF model Helikopter vb. ekipmanlar da bulunmaktadır.
Tasarım Metodolojisi ve Davranış Tabanlı Robot Tasarımı Laboratuvarı
Bu laboratuvar mekatronik tasarım ürünleri için tasarım metodolojilerinin araştırılması; bu sistemlerin kavramsal tasarımında olası davranışların modellenmesi ve simülasyonu; kavramsal robot tasarımında davranış tabanlı tasarım metodolojisinin geliştirilmesi ve uygulanması; mekatronik sistemlerin modüler tasarımı için yöntemlerin geliştirilmesi ve uygulanması için kullanılmaktadır

Proje Elemanları İmalat Montaj Laboratuvarı
Bu laboratuvar öğrencilerimizin mekatronik ürünlerini incelemeleri bileşenlerini ve nasıl kullanıldıklarını anlamaları amacı ile kullanılmaktadır. Birinci sınıf öğrencilerimiz söz konusu cihazları sökerek ve toplayarak bu amaçla kullanılan ekipmanları ve mekatronik cihazları tanımakta ve deneyim kazanmaktadır.
